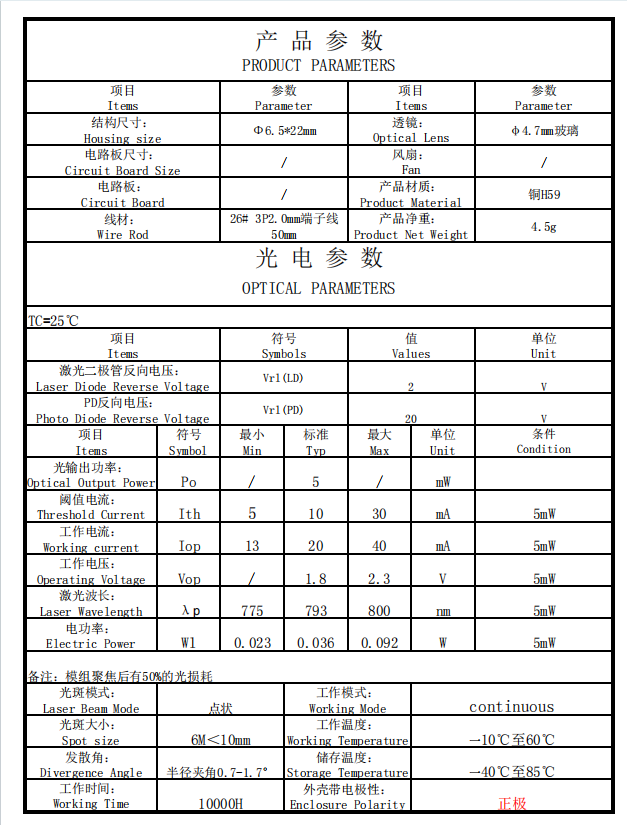
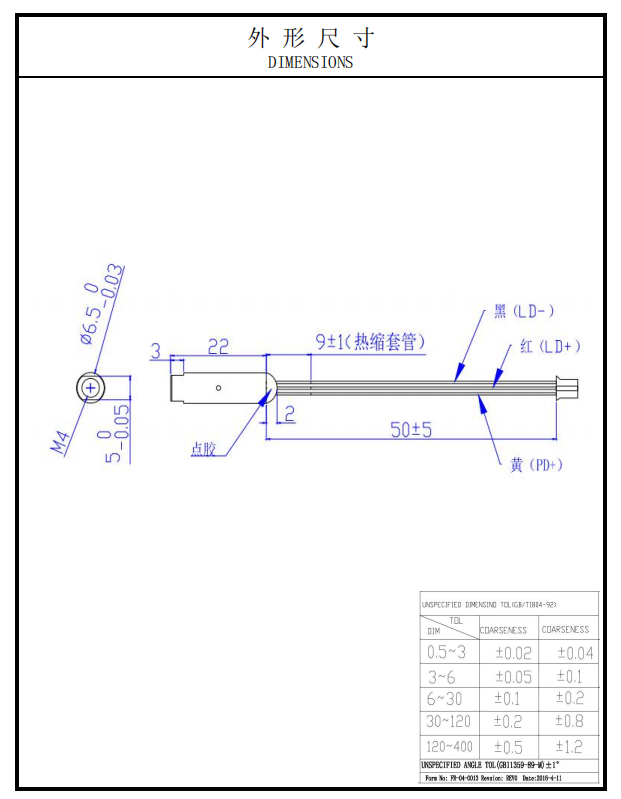
IR 780nm 5MW DOT -Laserdiodenmodul für Roboter -Lidar
Die Anwendung von Lasern bei weitläufigen Robotern spiegelt sich hauptsächlich in zwei Aspekten wider: Navigation und Hindernisbekennung.
Zunächst können Laser verwendet werden, um umfassende Roboter zu navigieren. LIDAR kann die Umgebung scannen, die Entfernungs- und Standortinformationen von Objekten messen und eine genaue Karte generieren. Der weitläufige Roboter kann seine Position und seinen Reiseweg basierend auf dieser Karte bestimmen, um eine genaue Navigation zu erreichen. Im Vergleich zu anderen Sensoren weist Lidar eine höhere Messgenauigkeit auf und kann genauere Navigationsinformationen liefern.
Zweitens können Laser auch zur Hindernisbekennung von umfassenden Robotern verwendet werden. Lidar kann die Umgebung scannen, das Vorhandensein von Hindernissen erkennen und sie identifizieren. Der umfassende Roboter kann entsprechende Entscheidungen treffen, die auf diesen Hindernissinformationen basieren, Hindernisse vermeiden oder Hindernisse umgehen, um die Reinigungsarbeit auszuführen. Die hohen Präzisions- und schnellen Scanfunktionen von Lidar können dazu beitragen, dass Roboter Hindernisse identifizieren und die Arbeitseffizienz und -sicherheit verbessern.
Im Allgemeinen kann die Anwendung von Lasern bei weitläufigen Robotern präzise Navigations- und Hinderniserkennungsfunktionen liefern, Robotern dabei helfen, autonom zu navigieren und Hindernisse zu vermeiden und die Reinigungseffizienz und Sicherheit zu verbessern.
 Deutsch
Deutsch